Comparaison entre les technologies du radar 24GHz et l’UWB
Radar 24 GHz
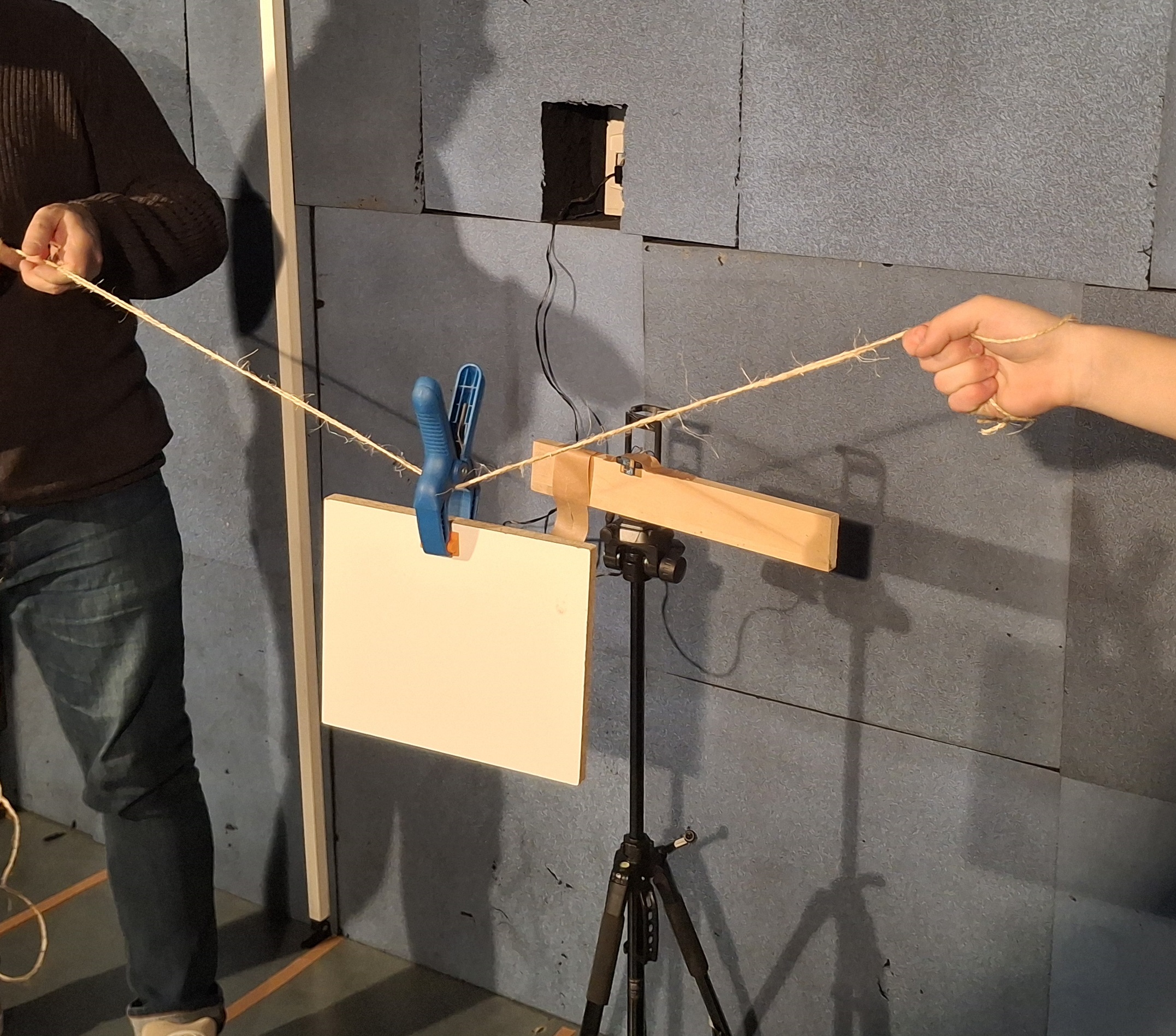
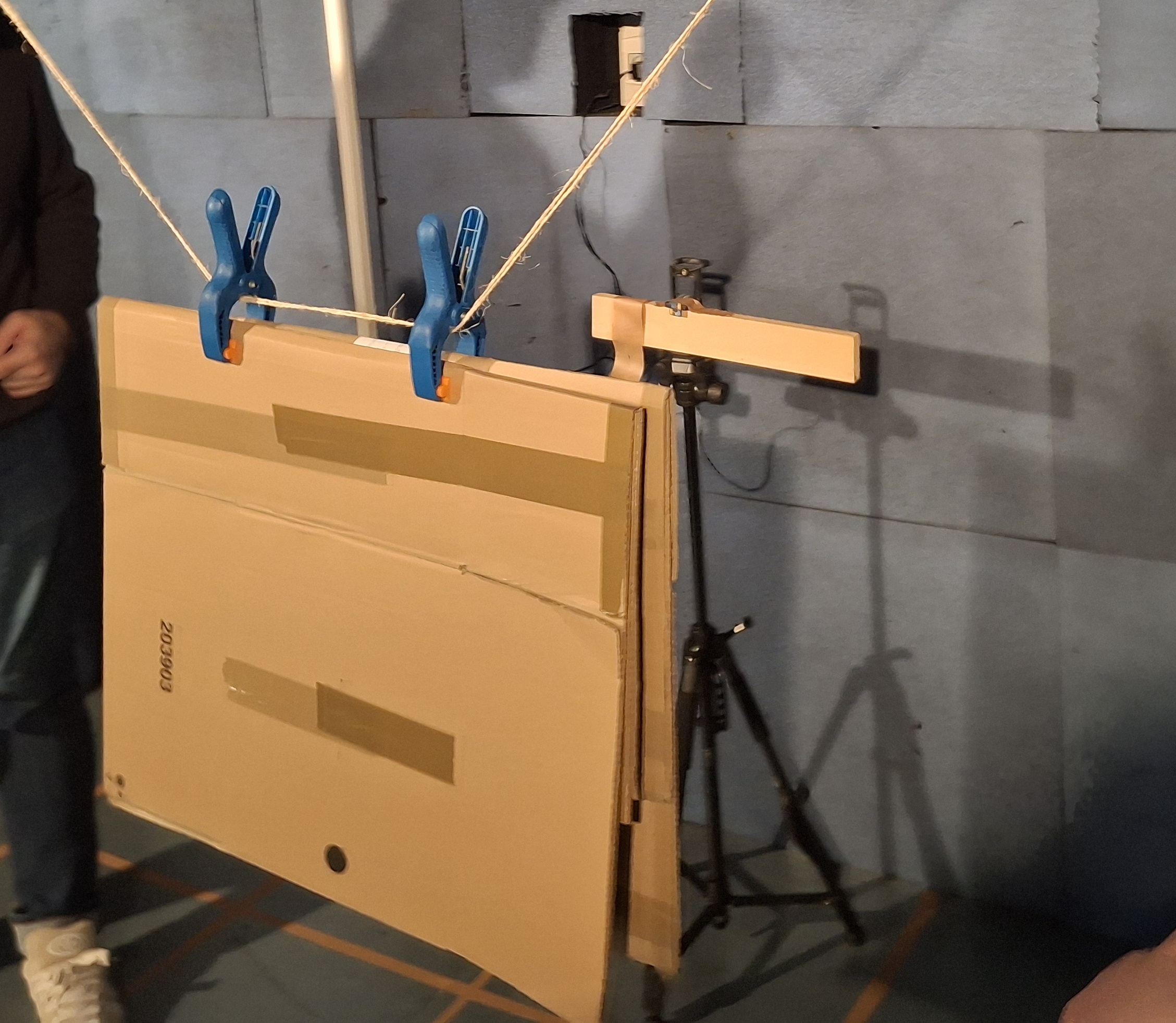
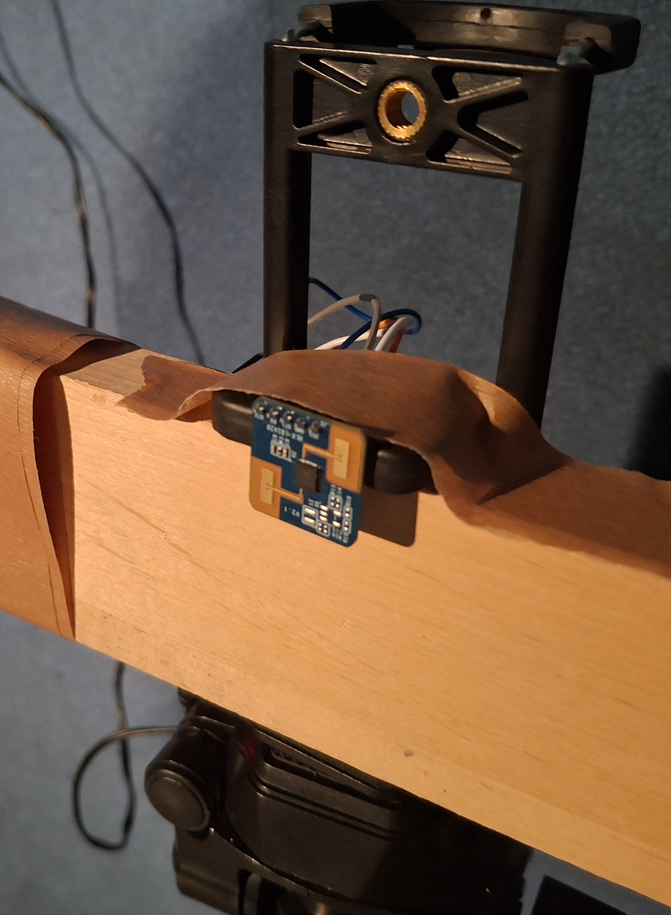
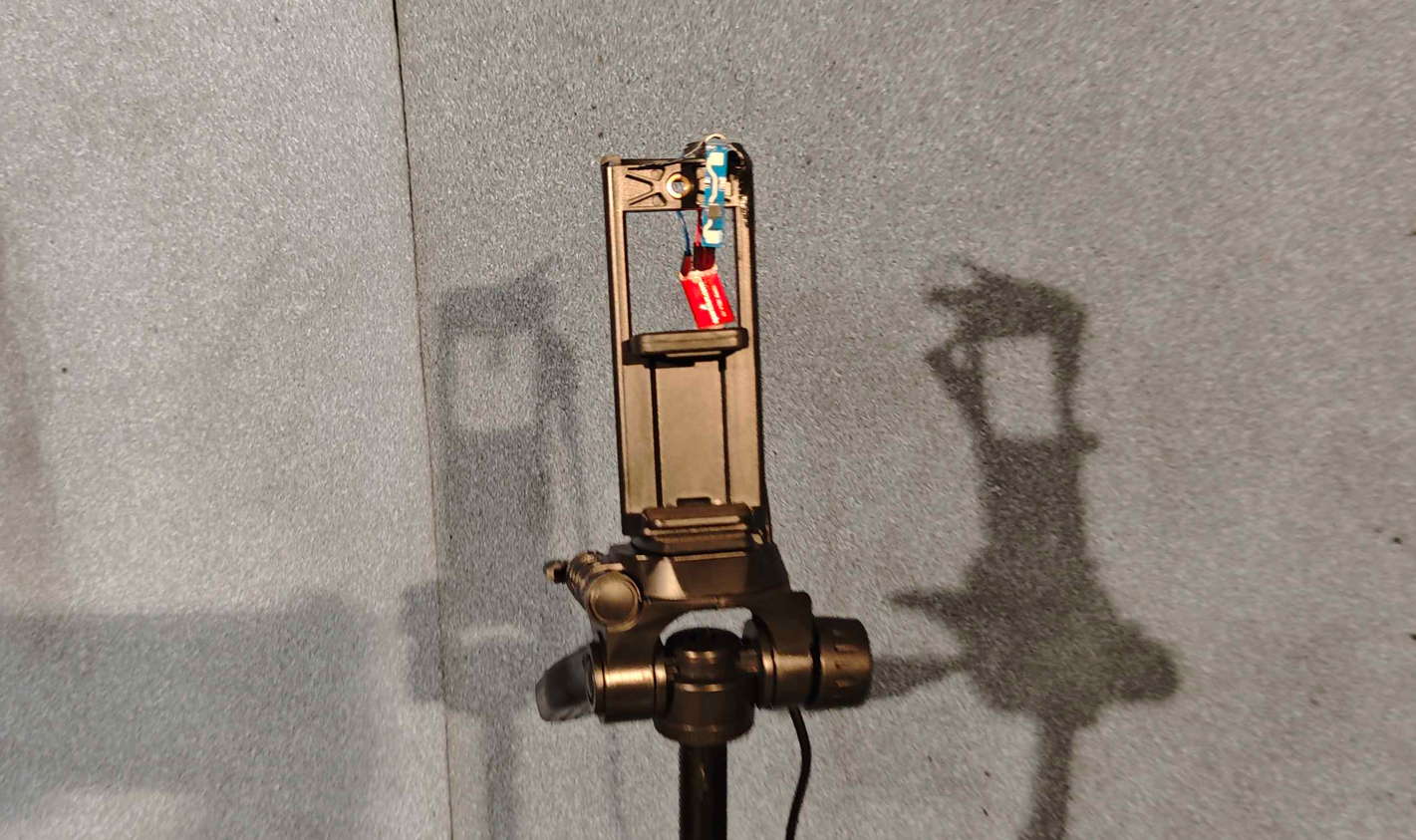
Le radar à 24 GHz utilise des ondes millimétriques pour détecter les mouvements et la présence. Cette fréquence offre un bon compromis entre portée de détection, résolution et pénétration à travers certains matériaux. Du moins, sur le papier. En effet, on se rend vite compte que la portée et la fiabilité sont très limitées en pratique avec les deux modèles que nous utilisons.
- Avantages : Détection précise (à 10cm près), insensible à la lumière.
- Applications potentielles : Détection de présence, monitoring d’activité, santé connectée
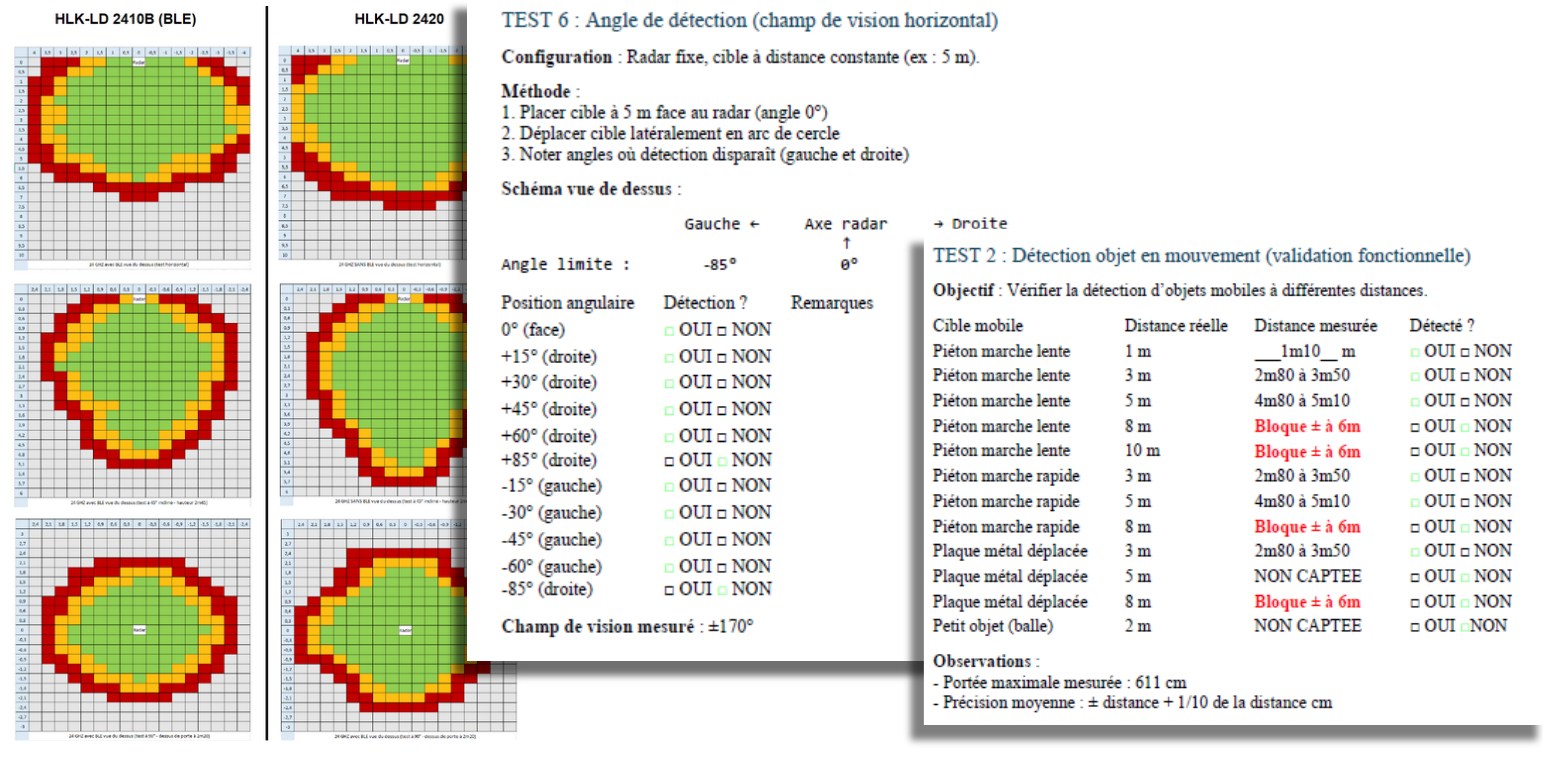
- Portée : Variable selon le modèle, aucun n’ayant atteint les performances attendues.
UWB (Ultra-Wideband)
L’UWB est une technologie de communication et de localisation sans fil utilisant une très large bande de fréquences. Nous comparons ici ses performances avec notre système radar 24 GHz.
- Avantages : très haute précision de localisation, faible consommation, passe sous les fréquences existantes donc déploiement possible à peu près partout…
- Applications potentielles : Localisation en intérieur, suivi d’objets/personnes, IoT.
- Portée : Environ 50m max en intérieur sans obstacles.
Comparaison des technologies
L’UWB est bien plus efficace sur de la détection de la localisation
spécifique, à quelques centimètres près. Elle peut aussi faire de la gestion 3D bien plus efficace. Le radar
24 GHz est plus limité dans ces aspects mais théoriquement plus simple à mettre en œuvre et plus fiable
sur du controle d’entrée/sortie plus traditionnel. Enfin, d’un point de vue fiabilité, les radars 24Ghz se gênent
mutuellement si leur rayon d’action entre en contact avec celui d’un autre de leur congénères; et d’un point de vue solidité,
l’UWB est plus robuste, mais malheureusement, il sera aussi plus énergivore sur les pics intenses
transmission / réception. Cependant, quand il n’est pas utilisé et donc on mode sleep ou deepsleep, sa consommation est absolument dérisoire.
Complémentarité : On peut donc dire que les deux technologies ont leurs forces et faiblesses,
et qu’une combinaison des deux pourrait offrir une solution optimale avec assez de temps de développement.
L’UWB ne gênant pas les radars 24 GHz, et vice versa, une intégration conjointe pourrait maximiser
les avantages de chaque technologie.
Critères de comparaison prévus
| Critère | Radar 24 GHz | UWB |
|---|---|---|
| Précision de localisation | Aléatoire entre 5 et 10 cm d’erreur (non conforme à l’objectif initial de ±5 cm) | Centimétrique (généralement < 2 cm) |
| Portée de détection | ~6 à 7 mètres (max 6,11 m avec BLE et 7 m environ sans BLE) | 10 à 50 mètres en intérieur (selon l’environnement) |
| Détection à travers obstacles | Limitée : traverse bois, plastique et carton ; le métal agit comme un réflecteur | Excellente : traverse murs, bois et plastique (bloquée par le métal trop épais) |
| Consommation énergétique | Consomme en moyenne 80 mA sous 5 V. Sa consommation peut monter jusqu’à 120 mA en pic d’opération | Ultra-faible (souvent < 150 mW, voire < 50 µW en veille) |
| Coût du matériel | de 1 à 3 euros. | Se compte en dizaines ou centaines d’euros en fonction des modules choisis |
| Facilité d’intégration | Moyenne : nécessite Python, MQTT pour de l’accessible | Élevée : protocoles standards (IEEE 802.15.4z) et écosystème RTLS mature (85% du code d’utilisation déjà créé par le fabricant). Une forte interopérabilité entre marques de capteurs, c’est fiable, documenté et standardisé. Avec des composant prêt à l’emploi comme les puces Decawave. |